使用CLion进行嵌入式开发并配置micro-ROS 接入ROS2生态 环境
Ubuntu 22.04
ROS2-Humble
MPU:STM32F407VET6
树莓派4b(已安装好ROS2-Humble)
可访问国际互联网的代理
性能较弱的芯片可能无法运行microros
配置开发环境 配置CLion开发嵌入式 参考稚晖君的博客https://zhuanlan.zhihu.com/p/145801160,以下步骤建立在已经安装好CLion喝CubeMX的情况下进行
下载arm-none-eabi-gcc ,解压
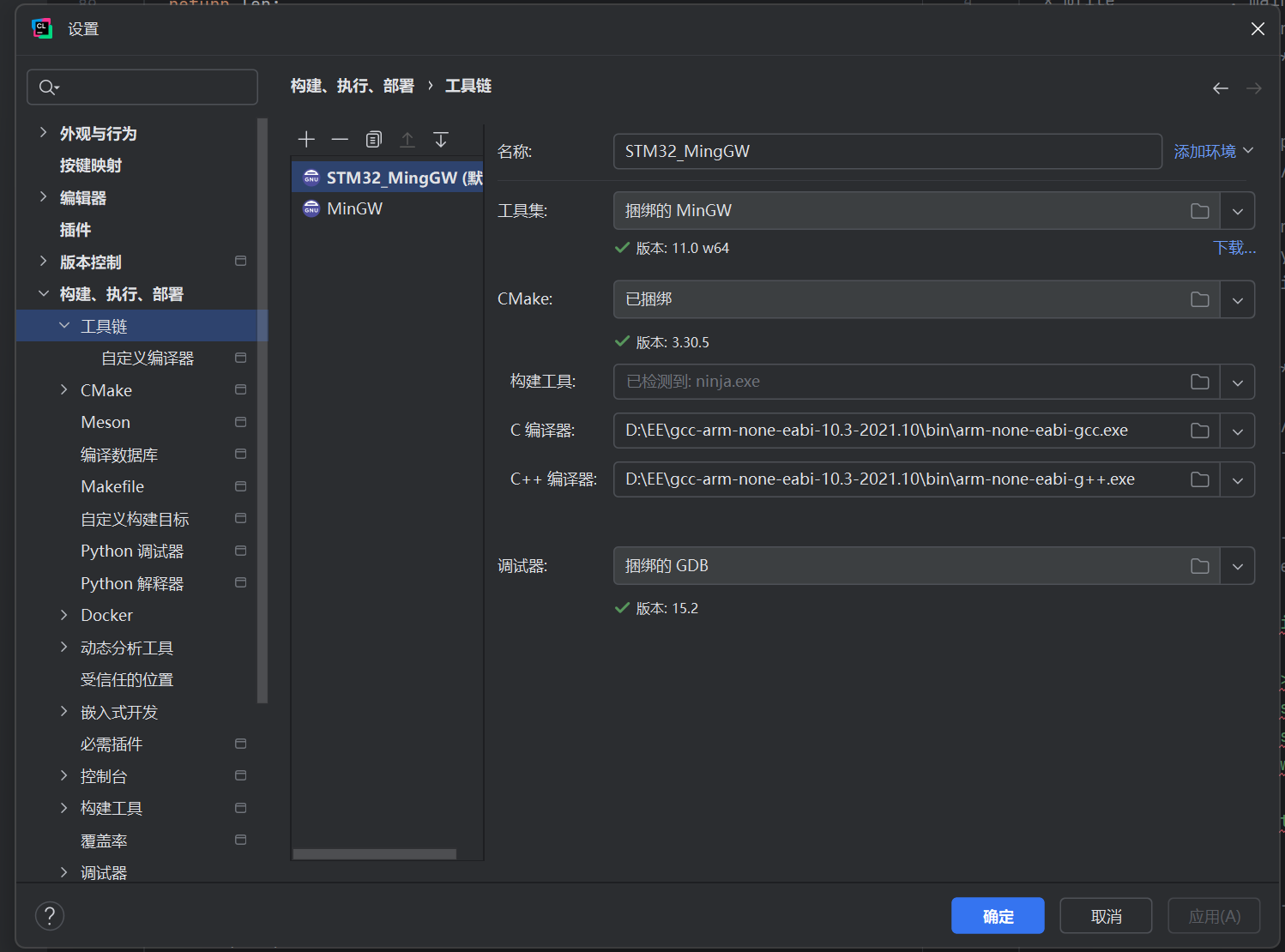
打开CLion,安装设置→构建、执行、部署→工具链,点击左上角加号添加一个工具链
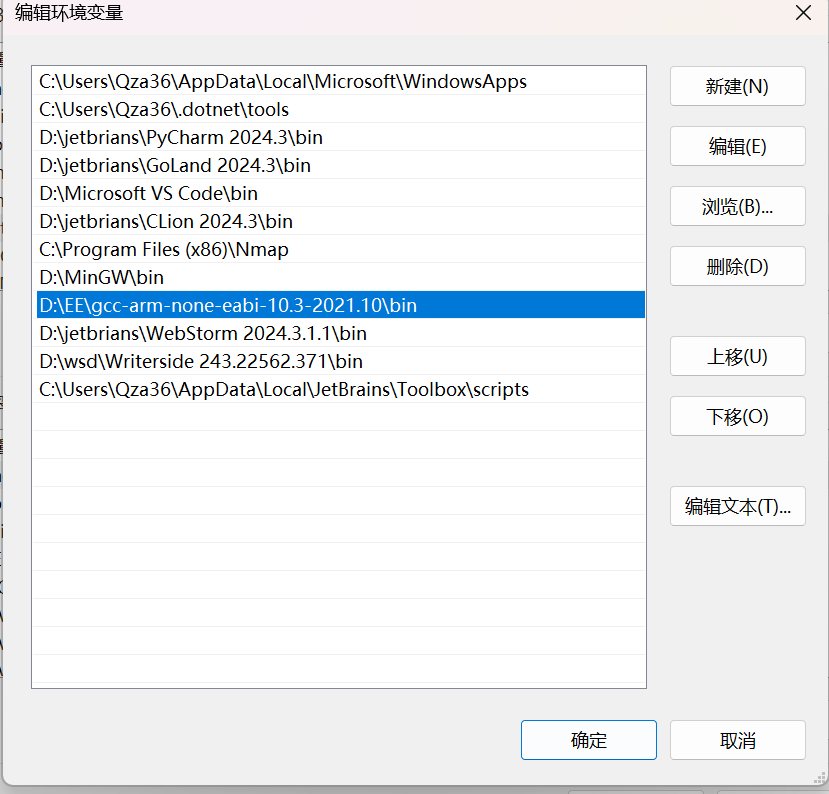
其中C和C++编译器选择上一步解压的arm-none-eabi-gcc,并把bin文件夹添加到环境变量
测试会在编译micro-Ros app中进行
使用CubeMX配置芯片 参考视频
micro_ros_stm32cubemx_utils
选择芯片型号STM32F407VET6
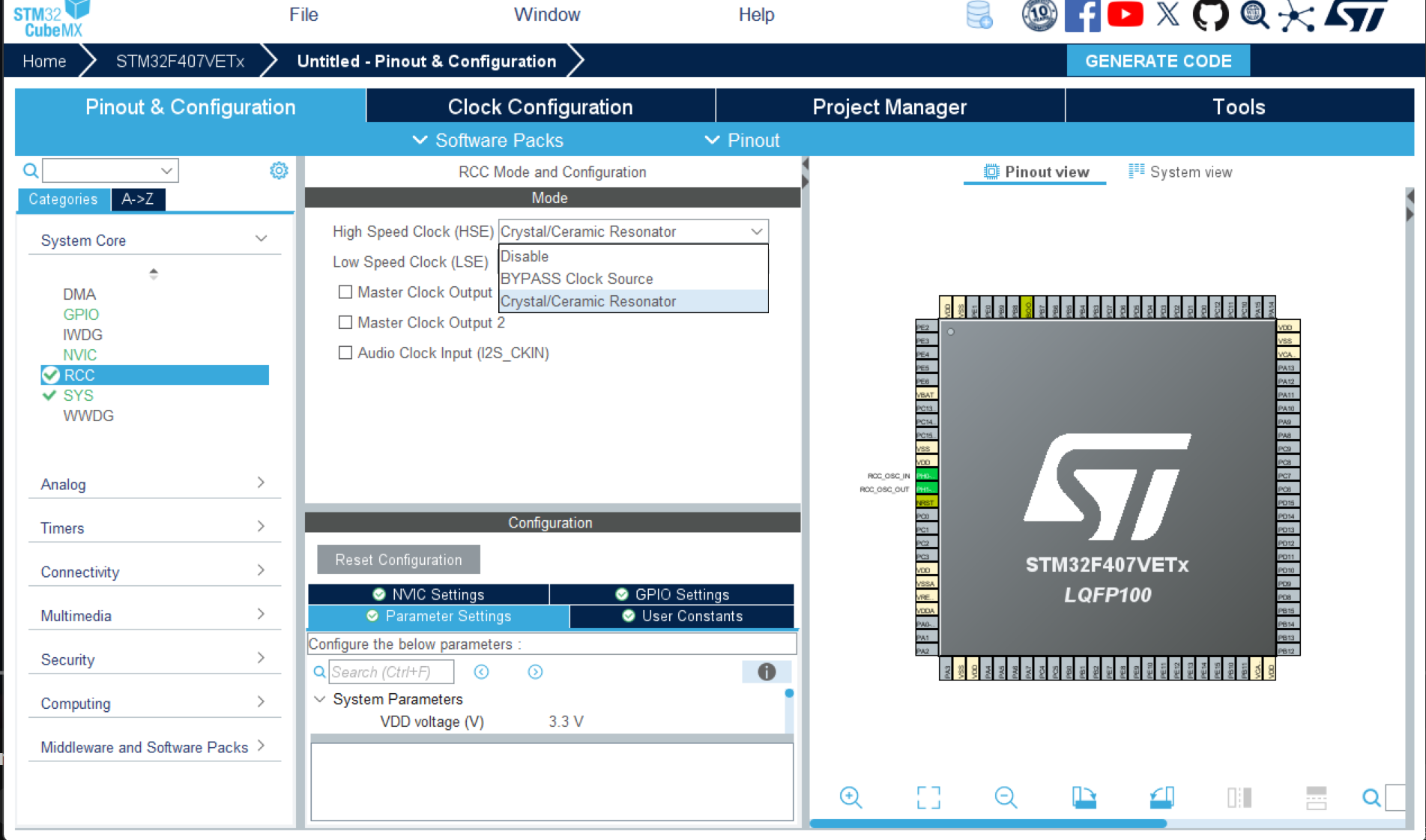
RCC配置,HSE选择crystal
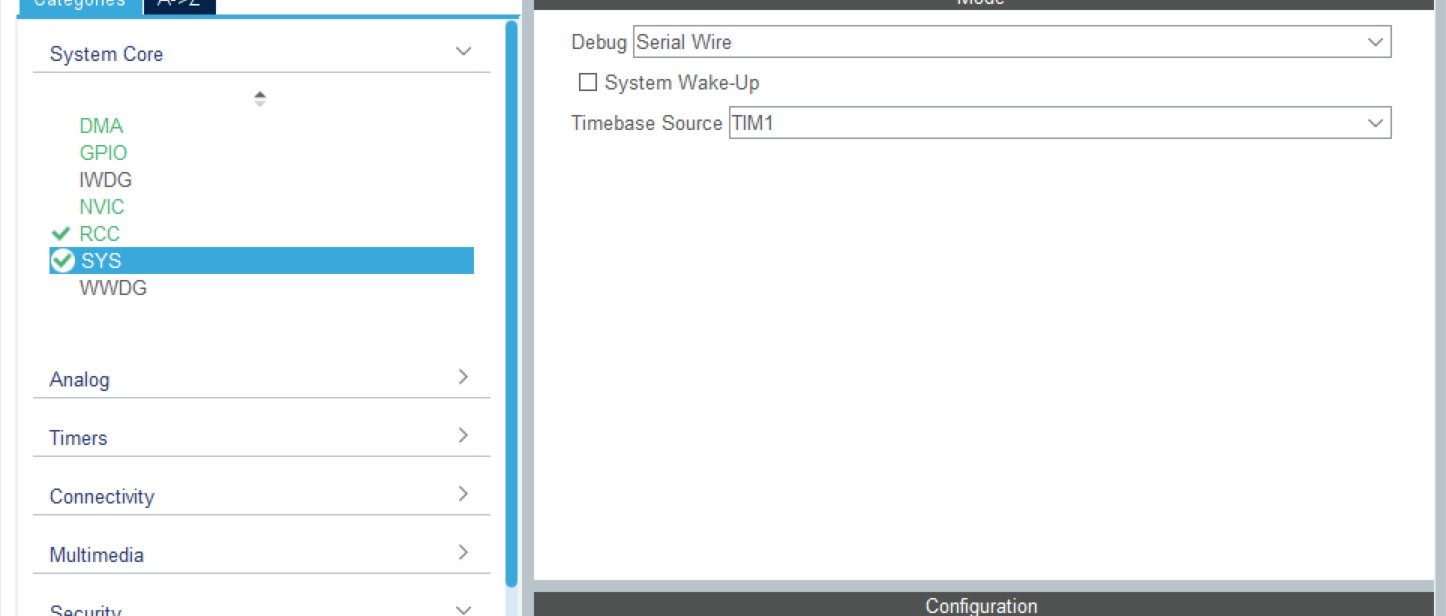
打开debugtimebase ,source 选择tim1
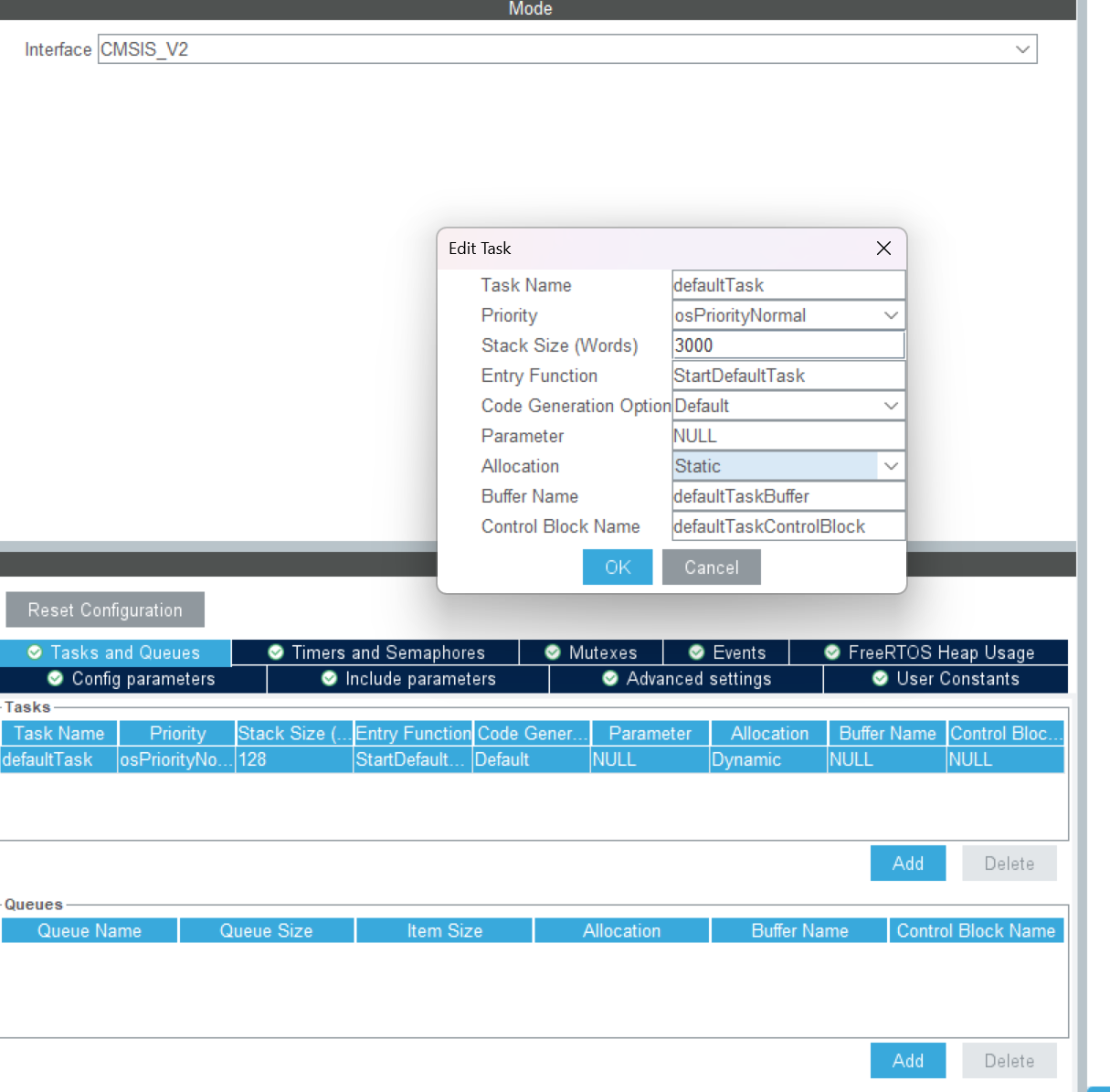
配置FREERTOS
选择中间件Middleware→freertos,interface选v2,选择Tasks and Queues,双击Tasks,配置如下
OK保存配置
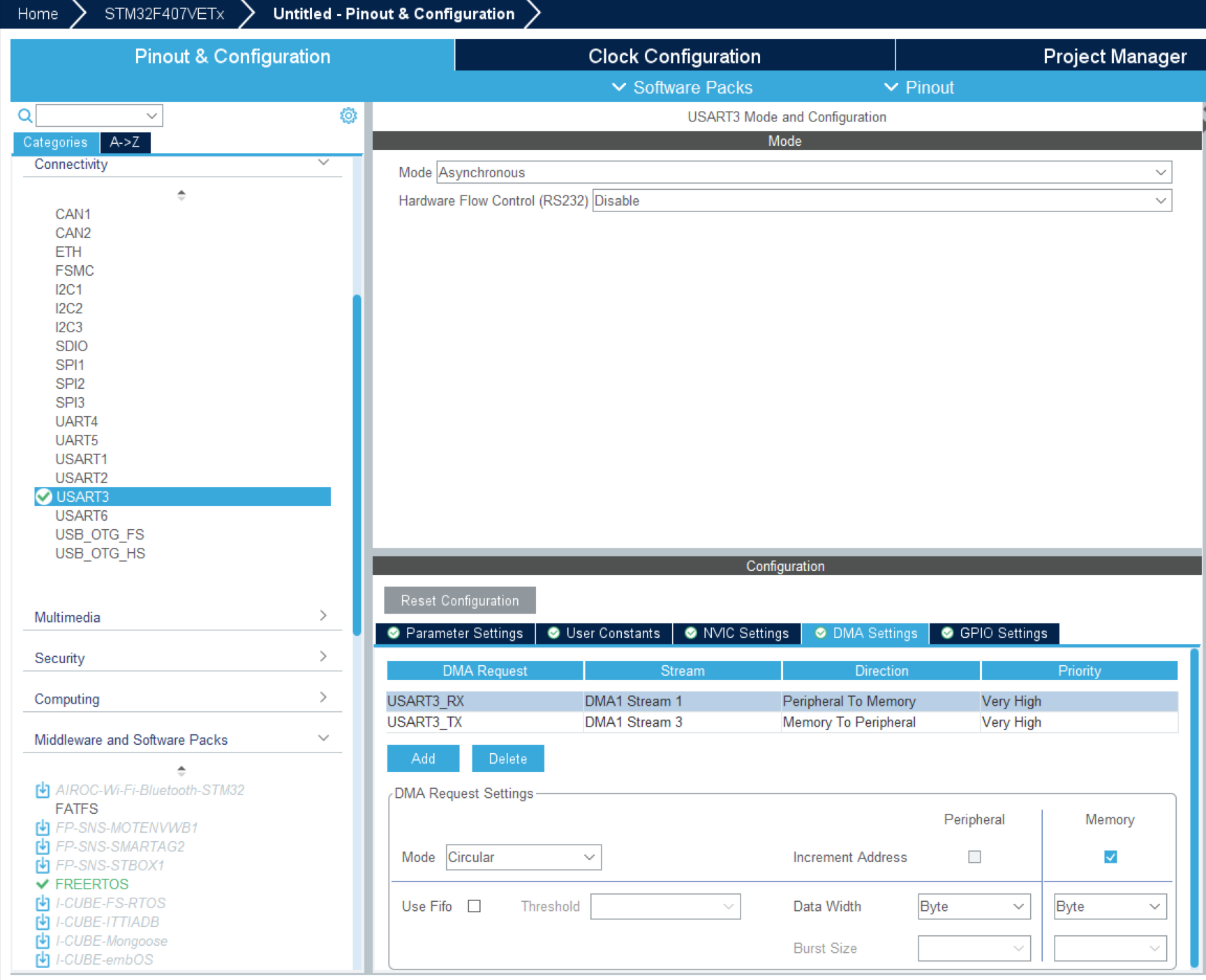
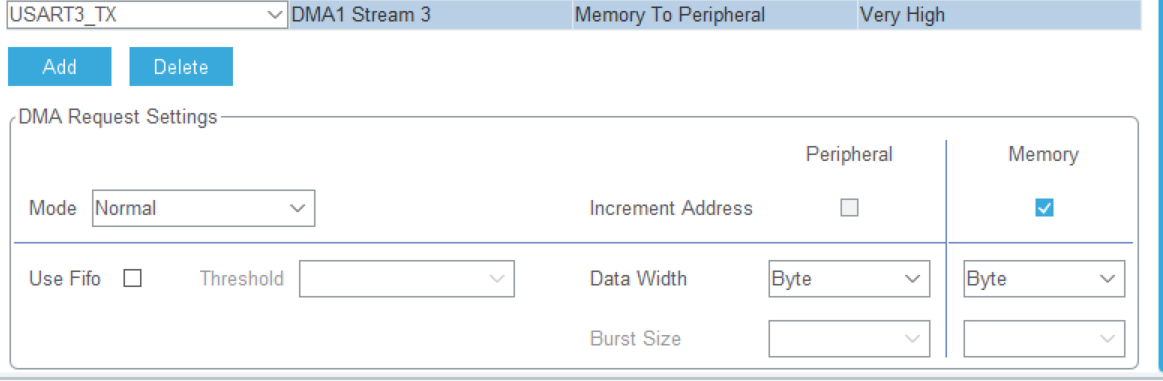
串口配置
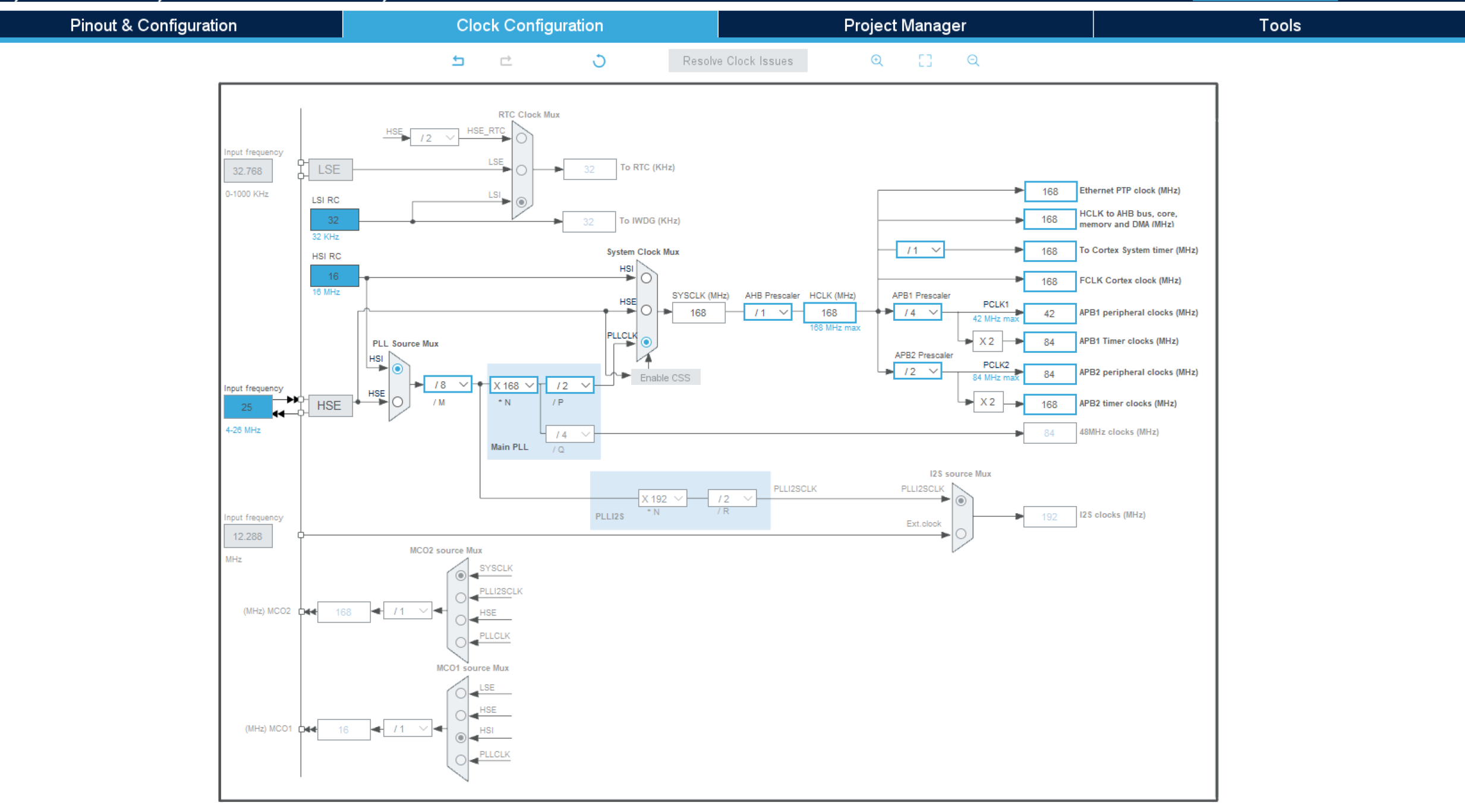
Clock Configuration
Project Mangager
Toolchain IDE选择Makefile
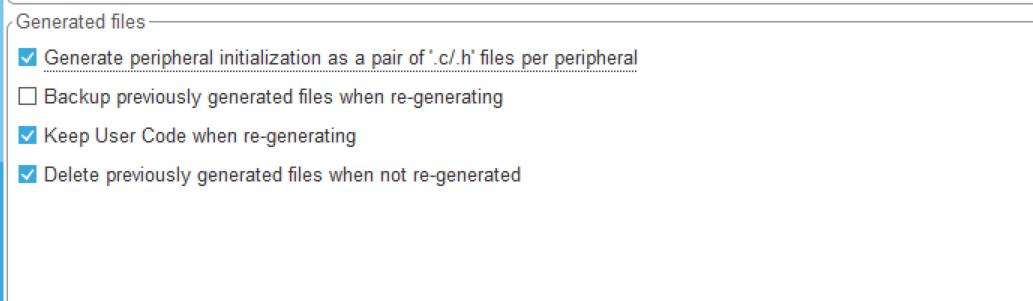
CodeGenerator
生成代码
创建microros-ROS app 准备工作
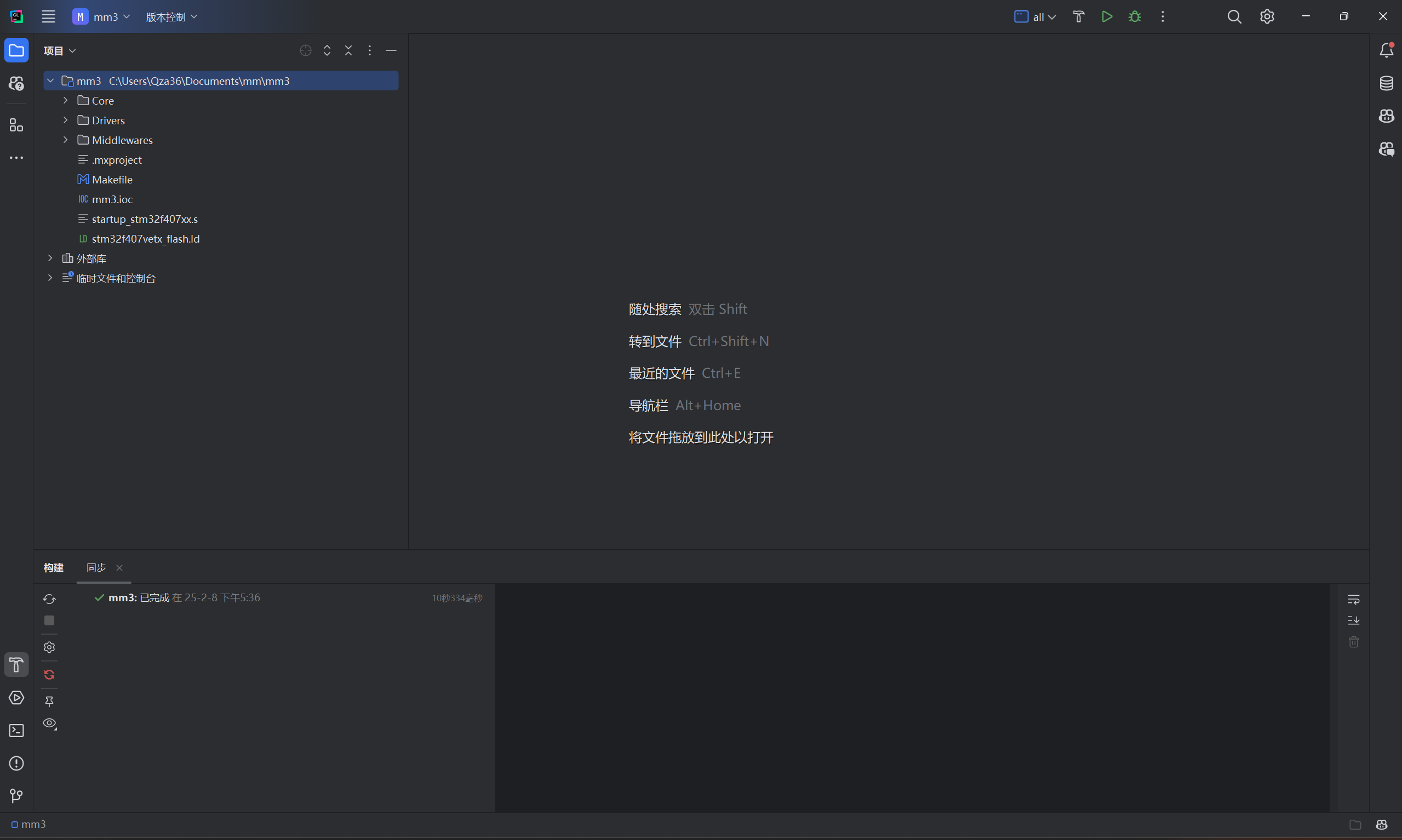
使用CLion打开刚才生成的文件夹
点击小锤子构建,输出以下构建成功,会多出一个build文件夹
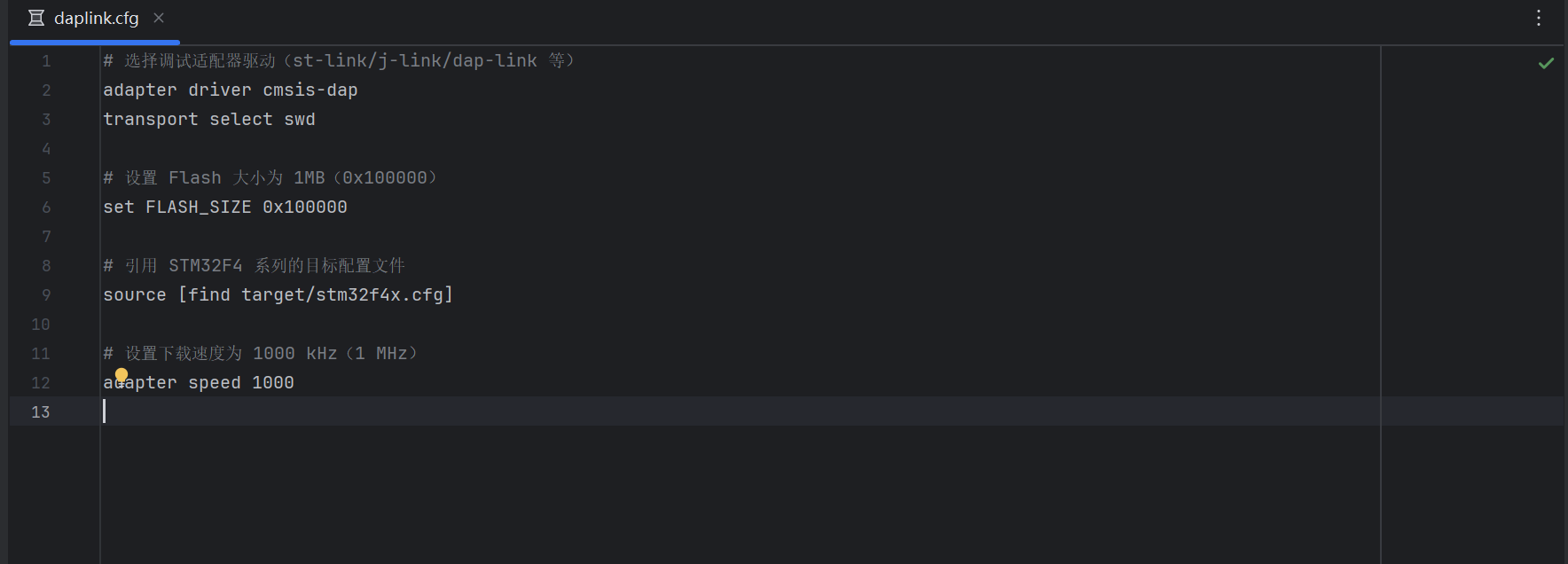
创建config文件夹,创建daplink.cfg,根据下载自定义文件内容
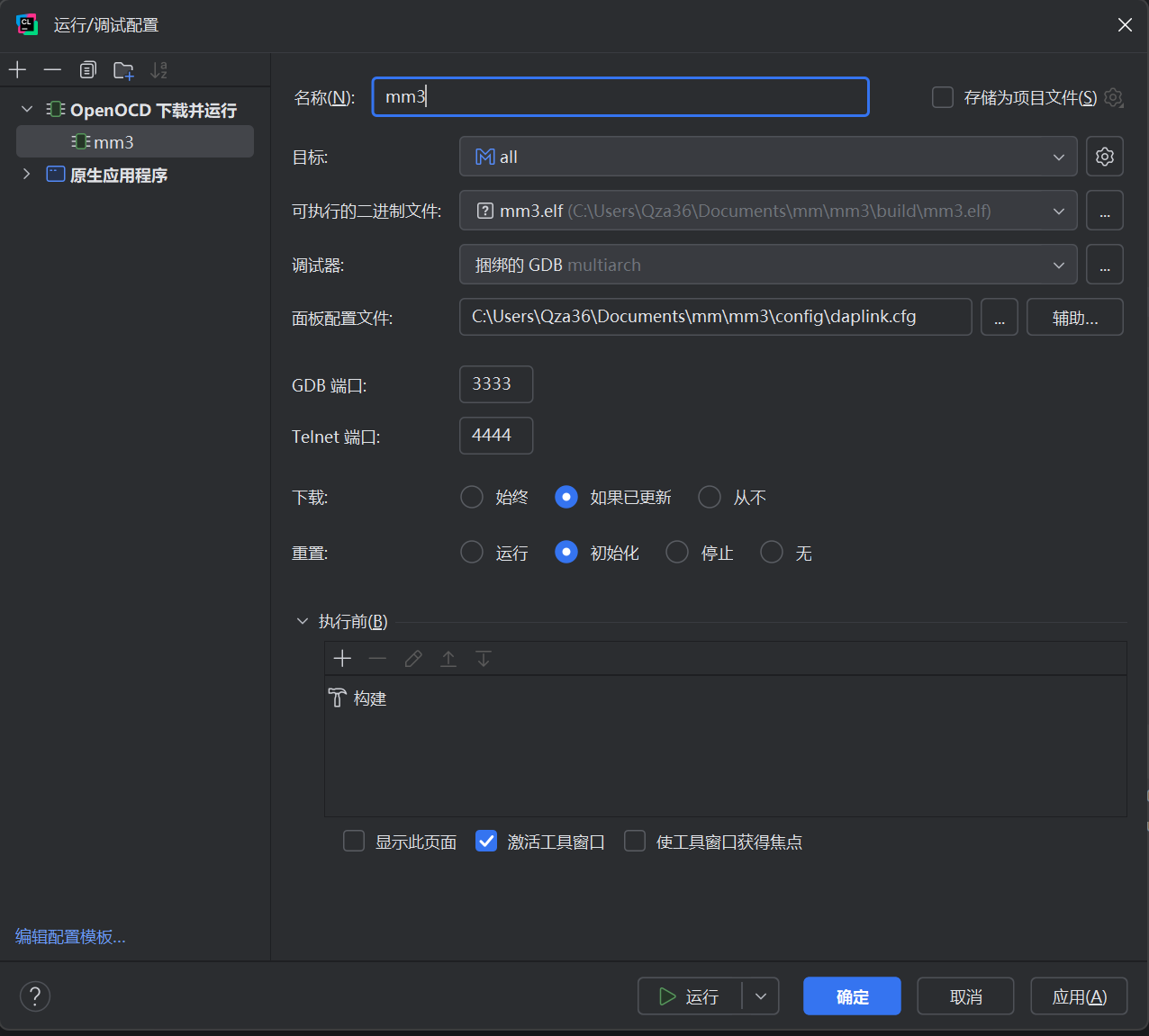
点击小锤子旁边的运行/调试配置,点击加号选择‘OpenOCD下载并运行’,根据自己路径填写可执行的二进制文件和面板配置文件
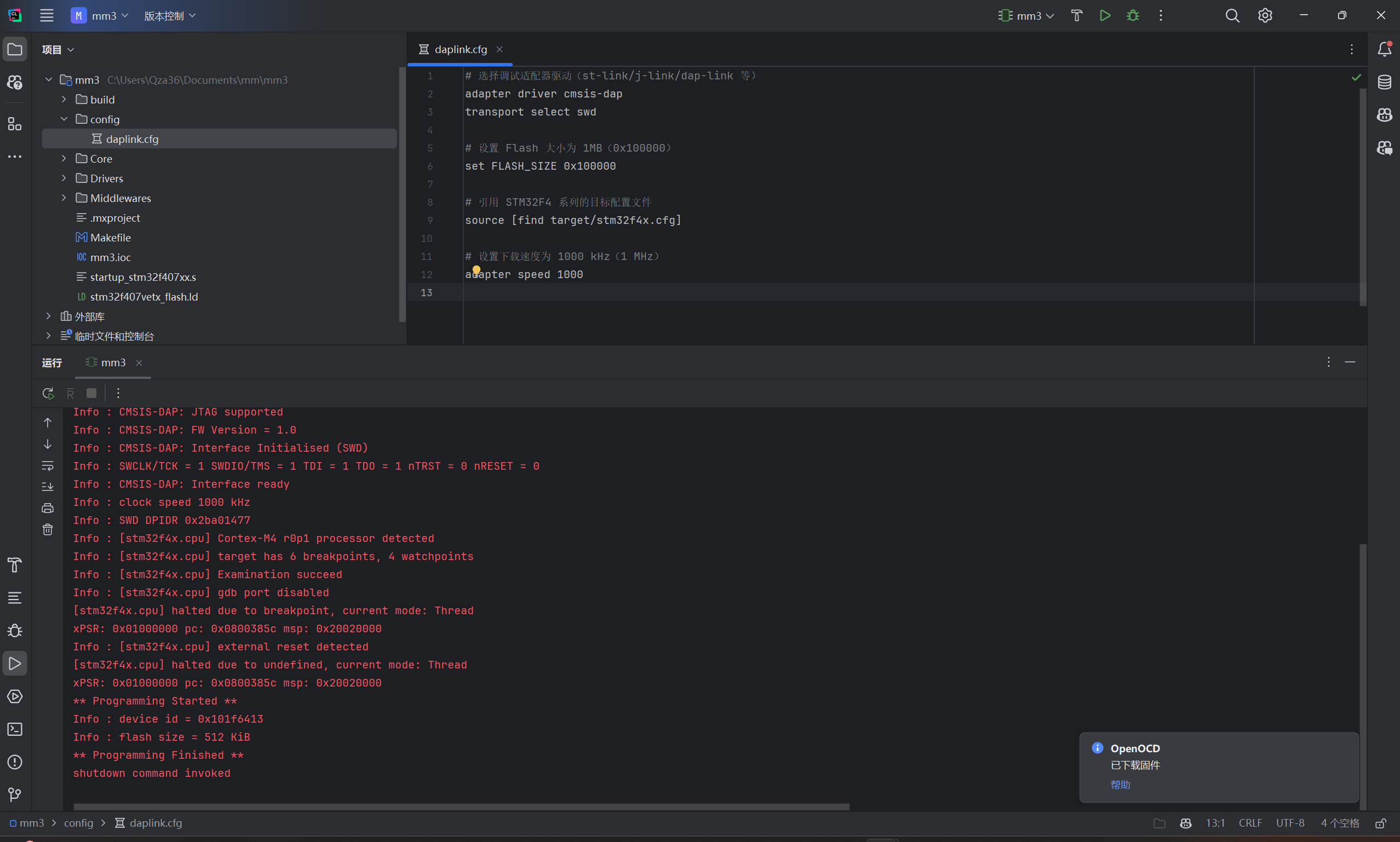
连接开发版,烧录代码,点击小锤子旁的绿色三角,提示已下载固件表示烧录成功
创建micoro-ROS app
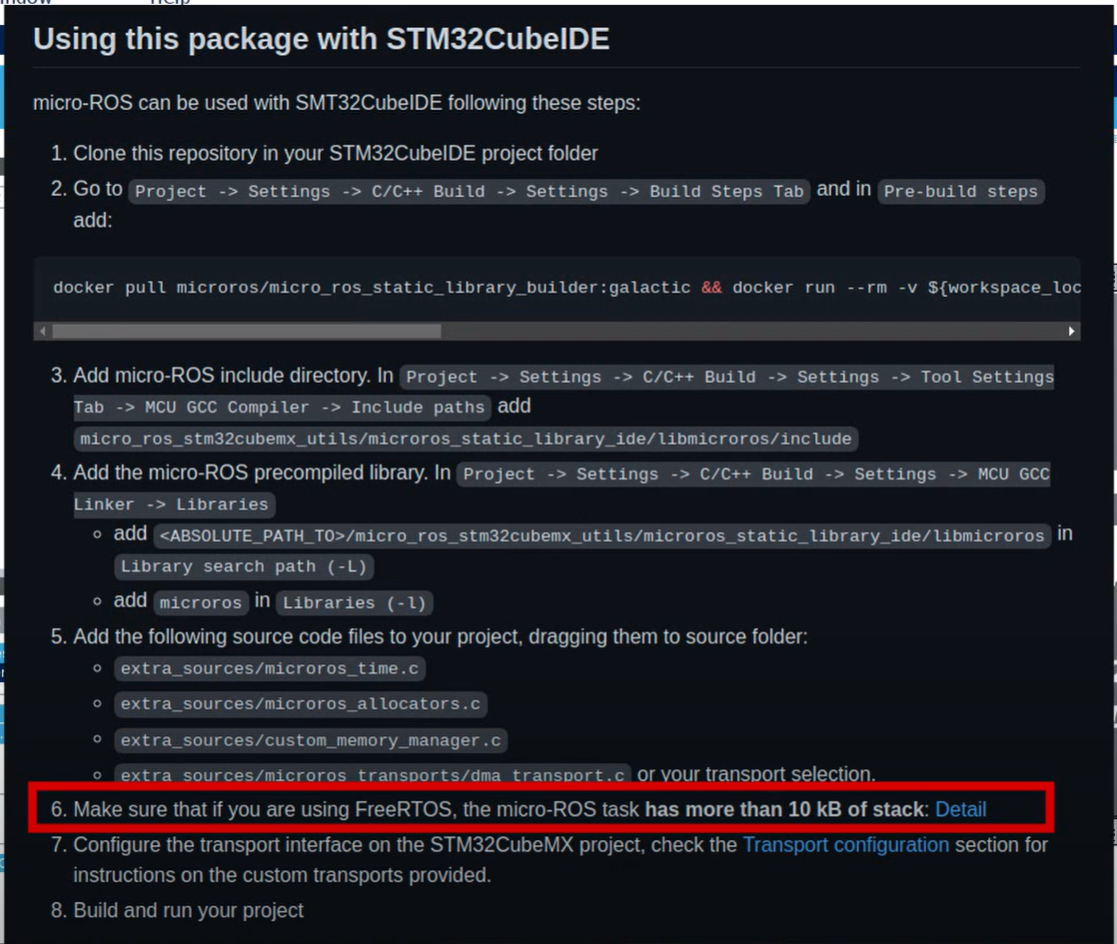
克隆https://github.com/micro-ROS/micro_ros_stm32cubemx_utils 到项目文件夹
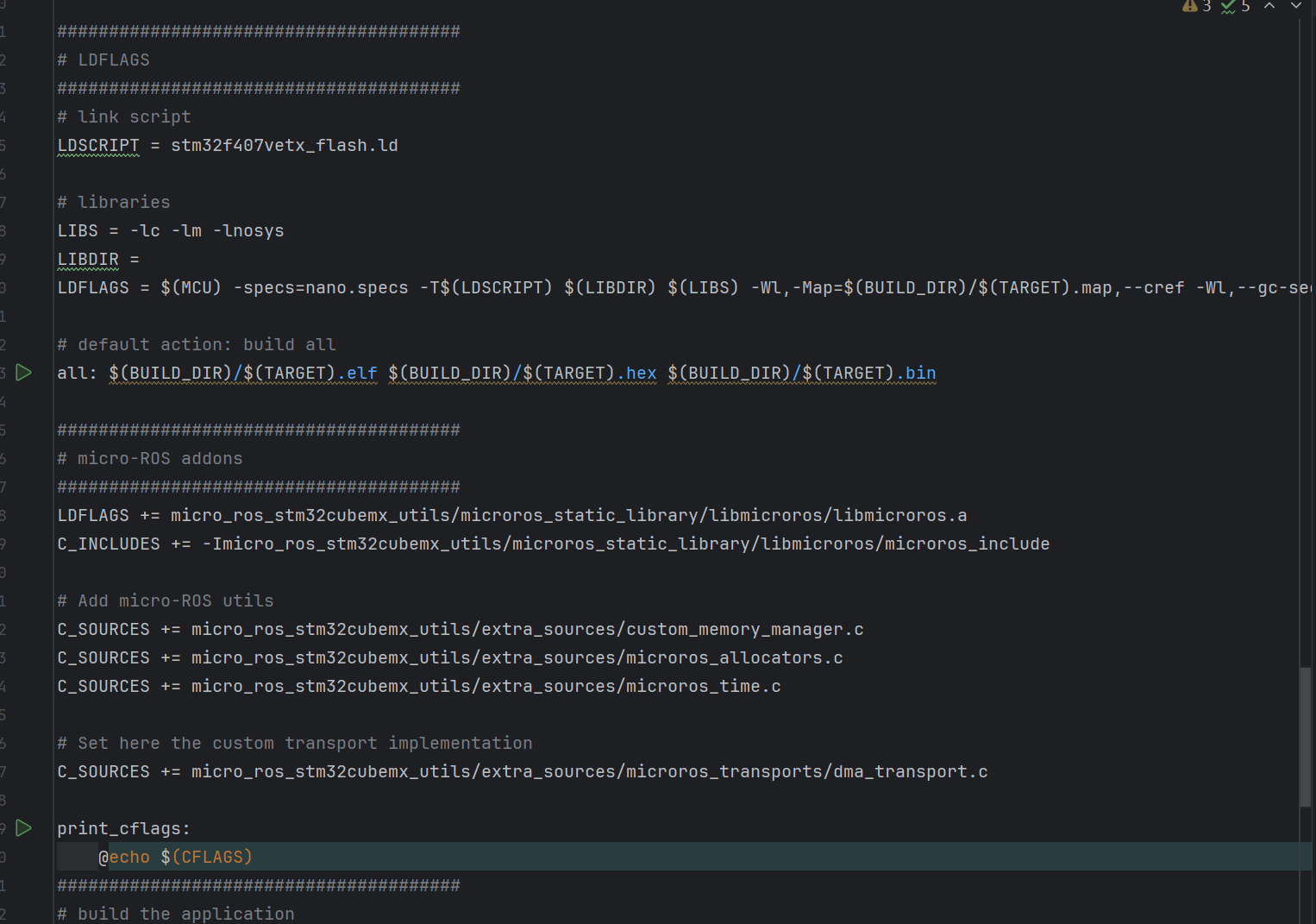
将以下内容复制到Makefile,注意复制到
# build the application 之前的一行
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 LDFLAGS += micro_ros_stm32cubemx_utils/microros_static_library/libmicroros/libmicroros.a C_INCLUDES += -Imicro_ros_stm32cubemx_utils/microros_static_library/libmicroros/microros_include C_SOURCES += micro_ros_stm32cubemx_utils/extra_sources/custom_memory_manager.c C_SOURCES += micro_ros_stm32cubemx_utils/extra_sources/microros_allocators.c C_SOURCES += micro_ros_stm32cubemx_utils/extra_sources/microros_time.c C_SOURCES += micro_ros_stm32cubemx_utils/extra_sources/microros_transports/dma_transport.c print_cflags: @echo $(CFLAGS)
执行静态库生成工具,我的代理端口是7897
1 docker run -it --rm -v ${PWD}:/project --env MICROROS_LIBRARY_FOLDER=micro_ros_stm32cubemx_utils/microros_static_library --env http_proxy=http://host.docker.internal:7897 --env https_proxy=http://host.docker.internal:7897 microros/micro_ros_static_library_builder:humble
编辑freertos.c,以下替换头文件
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 /* USER CODE BEGIN Header */ /** ****************************************************************************** * File Name : freertos.c * Description : Code for freertos applications ****************************************************************************** * @attention * * Copyright (c) 2024 STMicroelectronics. * All rights reserved. * * This software is licensed under terms that can be found in the LICENSE file * in the root directory of this software component. * If no LICENSE file comes with this software, it is provided AS-IS. * ****************************************************************************** */ /* USER CODE END Header */ /* Includes ------------------------------------------------------------------*/ /* Private includes ----------------------------------------------------------*/ /* USER CODE BEGIN Includes */ /* USER CODE END Includes */ /* Private typedef -----------------------------------------------------------*/ typedef StaticTask_t osStaticThreadDef_t; /* USER CODE BEGIN PTD */ bool cubemx_transport_open(struct uxrCustomTransport * transport); bool cubemx_transport_close(struct uxrCustomTransport * transport); size_t cubemx_transport_write(struct uxrCustomTransport* transport, const uint8_t * buf, size_t len, uint8_t * err); size_t cubemx_transport_read(struct uxrCustomTransport* transport, uint8_t* buf, size_t len, int timeout, uint8_t* err); void * microros_allocate(size_t size, void * state); void microros_deallocate(void * pointer, void * state); void * microros_reallocate(void * pointer, size_t size, void * state); void * microros_zero_allocate(size_t number_of_elements, size_t size_of_element, void * state);
编辑freertos.c里的StartDefaultTask函数
和main.c的while功能类似,来完成主要的逻辑,这段代码可以在micro_ros_stm32cubemx_utils/sample_main.c中找到,里面提供了各种实例
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 void StartDefaultTask(void *argument) { /* USER CODE BEGIN StartDefaultTask */ /* Infinite loop */ // micro-ROS configuration rmw_uros_set_custom_transport( true, (void *) &huart1, cubemx_transport_open, cubemx_transport_close, cubemx_transport_write, cubemx_transport_read); rcl_allocator_t freeRTOS_allocator = rcutils_get_zero_initialized_allocator(); freeRTOS_allocator.allocate = microros_allocate; freeRTOS_allocator.deallocate = microros_deallocate; freeRTOS_allocator.reallocate = microros_reallocate; freeRTOS_allocator.zero_allocate = microros_zero_allocate; if (!rcutils_set_default_allocator(&freeRTOS_allocator)) { printf("Error on default allocators (line %d)\n" , __LINE__); } // micro-ROS app rcl_publisher_t publisher; std_msgs__msg__Int32 msg; rclc_support_t support; rcl_allocator_t allocator; rcl_node_t node; allocator = rcl_get_default_allocator(); //create init_options rclc_support_init(&support, 0, NULL, &allocator); // create node rclc_node_init_default(&node, "cubemx_node" , "" , &support); // create publisher rclc_publisher_init_default( &publisher, &node, ROSIDL_GET_MSG_TYPE_SUPPORT(std_msgs, msg, Int32), "cubemx_publisher" ); msg.data = 0; for(;;) { rcl_ret_t ret = rcl_publish(&publisher, &msg, NULL); if (ret != RCL_RET_OK) { printf("Error publishing (line %d)\n" , __LINE__); } msg.data++; osDelay(10); } /* USER CODE END StartDefaultTask */ }
上面的代码创建了一个节点和一个发布者,发布一个整型数字,每次循环加一
编译烧录
配置ros-agent与micoro-ROS通信
使用SSH连接树莓派
若忘记IP地址可用Nmap扫描
安装ros-agent
1 2 3 4 5 6 7 8 sudo apt-get install -y build-essential mkdir -p microros_ws/src cd microros_ws/src git clone http://github.fishros.org/https://github.com/fishros/micro-ROS-Agent.git -b humble git clone http://github.fishros.org/https://github.com/micro-ROS/micro_ros_msgs.git -b humble cd ~/microros_ws/ colcon build source install/setup.bash
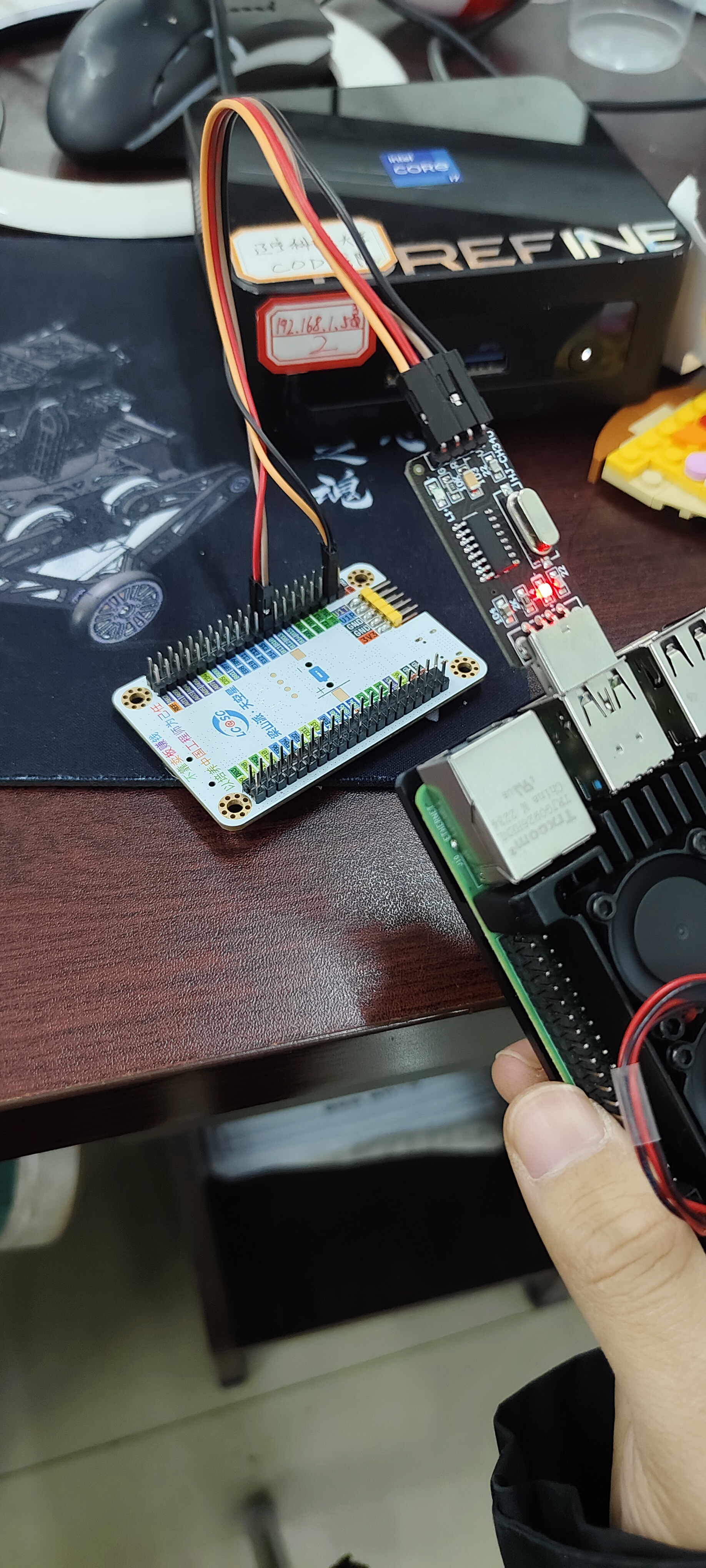
使用usb转ttl将开发版和树莓派连接
运行agent
1 ros2 run micro_ros_agent micro_ros_agent serial -b 115200 --dev /dev/ttyUSB0
注意波特率,一般默认是115200,设备号一般是ttyUSB0
按下RST键,通信成功
使用foxglove进行可视化
安装
1 sudo apt install ros-$ROS_DISTRO-foxglove-bridge
Launch
1 ros2 launch foxglove_bridge foxglove_bridge_launch.xml
注意端口是8756
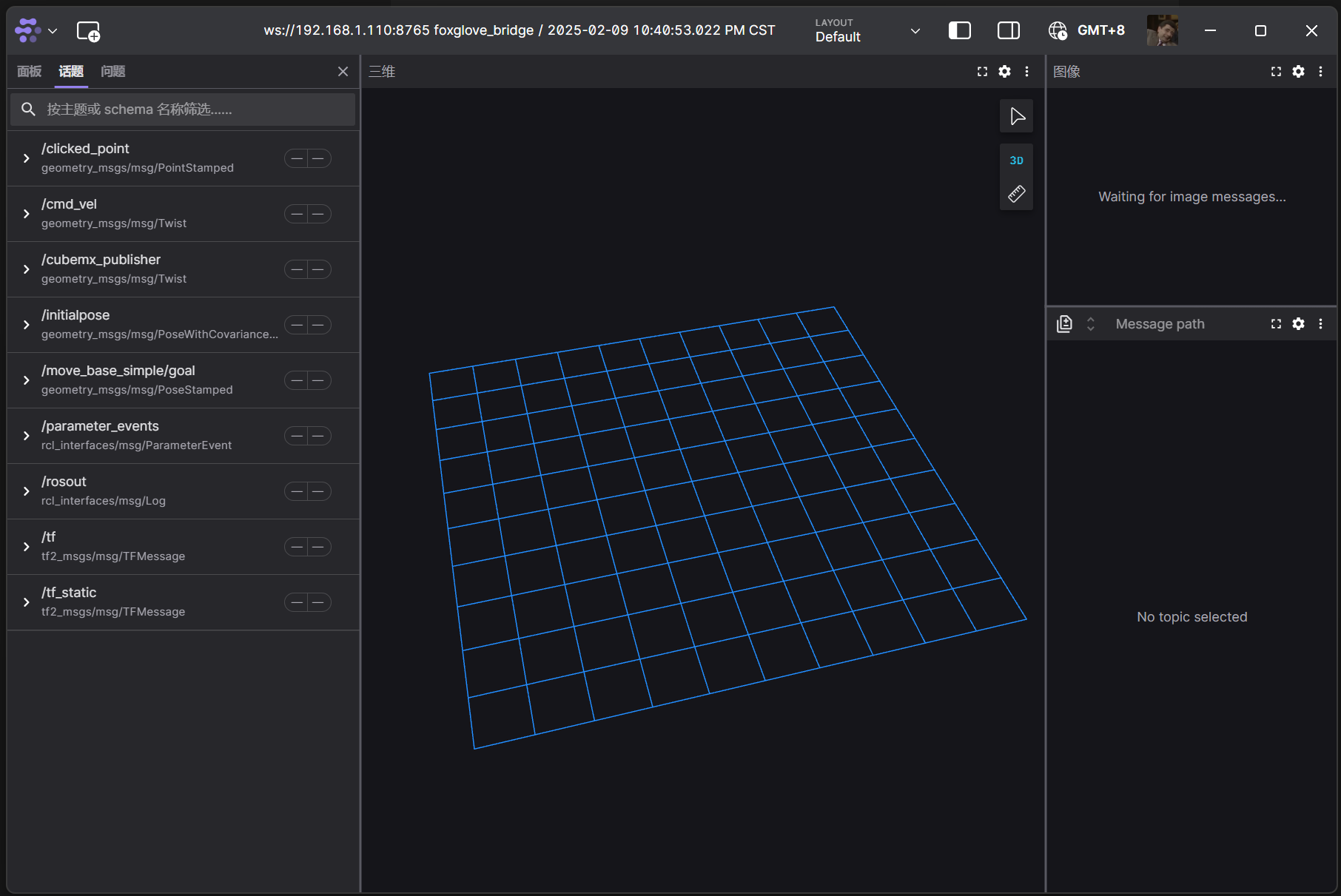
打开foxglove建立连接
可以看到micro-ROS的话题出现在这里了